Research field B: (De-)centralized cooperative traffic management
Research field B put emphases on key models and key methods of (de-)centralized cooperative traffic management which are investigated in the research areas (De-)centralized cooperative traffic management (B1) and Distributed intelligent and cooperative systems (B2).
B1. Sustainable cooperative traffic management for urban environments (Prof. Friedrich)
B1.1 Qinrui Tang: Left Turn Prohibition Problem combining Traffic Assignment
B1.2 Aleksandar Trifunović: (Re)design of public transport network to integrate shared modes of transport
B2. Distributed intelligent and cooperative systems (Prof. Müller)

B2.1 Malte Aschermann: Automated Mechanisms of Cooperative Traffic Flow Coordination: Fairness vs. Efficiency

Cooperative Lane Management and Traffic flow Optimisation
To answer my research questions regarding coordination mechanisms on 2+1 roadways, I developed the platform Cooperative Lane Management and Traffic flow Optimisation (CoLMTO).
Execution Model
The execution model of CoLMTO, developed to conduct my simulation studies, is depicted in the following figure:

Architecture
The software architecture is structured as follows:

Source Code Statistics




Activities
- 2017-09-19: After ~3 months of preparation, we held the multi-agent simulation workshop for the 2nd SocialCars cohort. My part was designing and realising the didactic concepts of the workshop.
- 2017-09-05: Presented our publication Towards Fair and Efficient Traffic Flow Coordination Mechanisms for 2+1 Roadways at EWGT 2017, Budapest, 20th EURO Working Group on Transportation Meeting.
- 2017-06-30: Presented Confirmability and reproducibility of scientific insights and artefacts at the SocialCars kickoff workshop for the 2nd cohort. Philipp Kraus and I put forward solutions to ensure reproducibility and transparency of scientific models and results in compliance with DFG regulations.
- 2017-04-06: Released v0.1.1 of CoLMTO, referenced as
 .
.
It was used for simulating satisfaction, fairness and efficiency on 2+1 roadways. The findings were submitted as EWGT 2017 paper Towards Fair and Efficient Traffic Flow Coordination Mechanisms for 2+1 Roadways. The resulting/related dataset is available as .
. - 2016-12-15: Attended EUMAS 2016, Valencia, 14th European Conference On Multi-Agent Systems and presented paper LightJason: A BDI Framework Inspired by Jason.
- 2016-11-20: Co-authored technical report about LightJason, published in the IfI Technical Report Series.
- 2016-10-19: Co-authored paper LightJason: A BDI Framework Inspired by Jason (got accepted for publication at EUMAS 2016).
- 2016-06-02: Attended SECURITY 2016, Braunschweig.
- 2015-07-06: Attended EASSS 2015, Barcelona, 17th European Agent Systems Summer School.
- 2015-05-31: Attended 9th Joint Workshop of the German Research Training Groups in Computer Science, Dagstuhl 2015 and presented my research topics in a poster session.
- 2015-02-12: Attended AAET 2015.
LightJason/AgentSpeak(L++)
Since 2015, I am working together with Philipp Kraus and Sophie Dennisen on a joint project called LightJason/AgentSpeak(L++).
As described on our website
LightJason is a concurrent BDI multi-agent framework for creating a multi-agent systems with Java. The project is inspired by AgentSpeak(L) and Jason, but designed and implemented from scratch. LightJason is fine-tuned to concurrent plan execution suitable for distributed computing environments and aims at efficient and scalable integration with existing platforms.
Our goal is to provide researchers a scalable platform to simulate multi-agent environments with concurrent execution in mind.
Related student research projects (supervised by me)
- Platooning models for autonomous vehicles in SUMO (GitHub)
- Vehicle following models with social force (BSc thesis, GitHub)
- Agent-based simulation of cooperative driving manoeuvres of autonomous cars (BSc thesis, GitHub)
- Aufdeckung von regelwidrigem Verhalten von Agenten im Verkehrskontext (Revealing rule-adverse behaviour of agents in traffic context) (BSc thesis)
- Entwicklung eines institutionellen Frameworks für multiagentenbasierte Verkehrssimulationen (Developing an institutional framework for multiagent-based traffic simulations) (MSc thesis)
Publications
- 📖 Aschermann, M.; Dennisen, S.; Kraus, P.; Müller, J. (2018). LightJason, a Highly Scalable and Concurrent Agent Framework: Overview and Application (Demonstration). pp. tbd, ACM Proceedings. Accepted, to appear.
- 📖 Aschermann, M.; Friedrich, B.; Müller, J. (2017). Towards fair and efficient traffic flow coordination mechanisms for 2+1 roadways. pp. 436-443, Transportation Research Procedia. .
- 📖 Aschermann, M.; Kraus, P.; Müller, J. (2017). LightJason: A BDI Framework inspired by Jason. Lecture notes in computer science - Multi-Agent Systems and Agreement Technologies: 14th Europ. Conf., EUMAS 2016, and 4rd int. Conf., AT 2016, Valencia, Spain, 2016, pp. 58-66, volume 10207. Springer International Publishing.
- 📖 Rybarsch, M.; Aschermann, M.; Bock, F.; Goralzik, A.; Köster, F.; Ringhand, M.; Trifunović, A. (2017). Cooperative parking search: Reducing travel time by information exchange among searching vehicles.
- 📖 Aschermann, M.; Kraus, P.; Müller, J. (2016). LightJason: A BDI Framework Inspired by Jason. IfI-16-04. Department of Informatics, Clausthal University of Technology.
B2.2 Sophie Dennisen: Collective Decision-Making Mechanisms in Urban Traffic
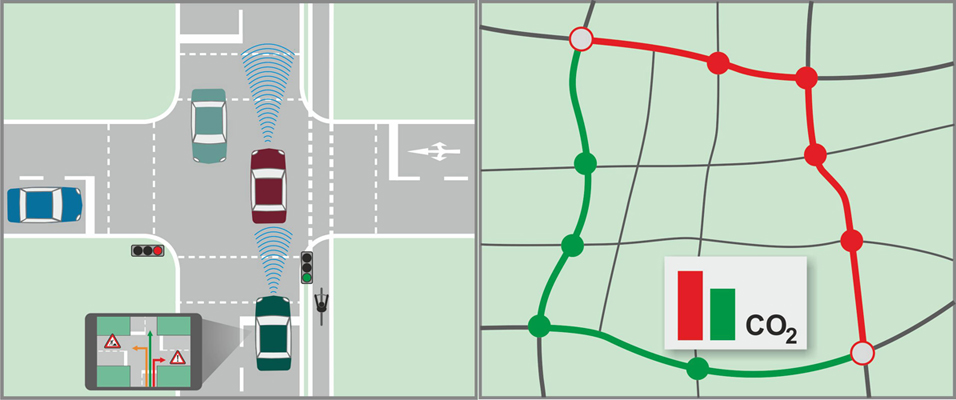
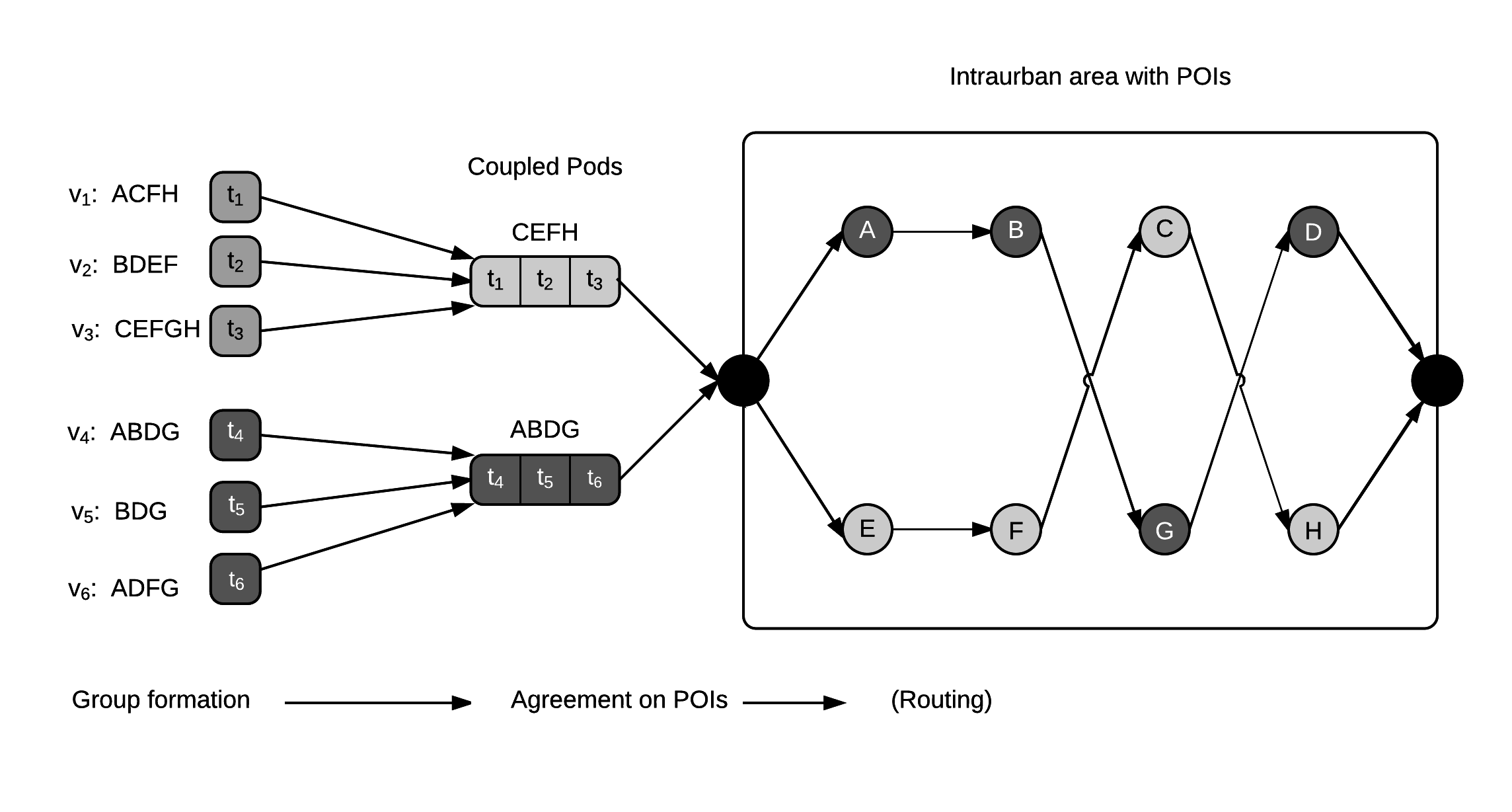
Considered Scenario
In my research, I consider an intraurban (future) scenario where visitors of a city form travel groups at pre-defined locations and need to agree on locations to visit together.
LightVoting
To answer my research questions regarding the suitability of different voting mechanisms for collective decision making in urban traffic, I developed the simulation tool LightVoting which is based on LightJason developed by my colleagues Philipp Kraus and Malte Aschermann.
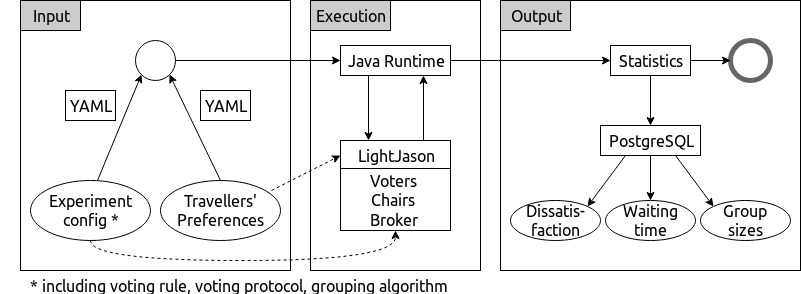
Execution Model
The following figure depicts the execution model of LightVoting:
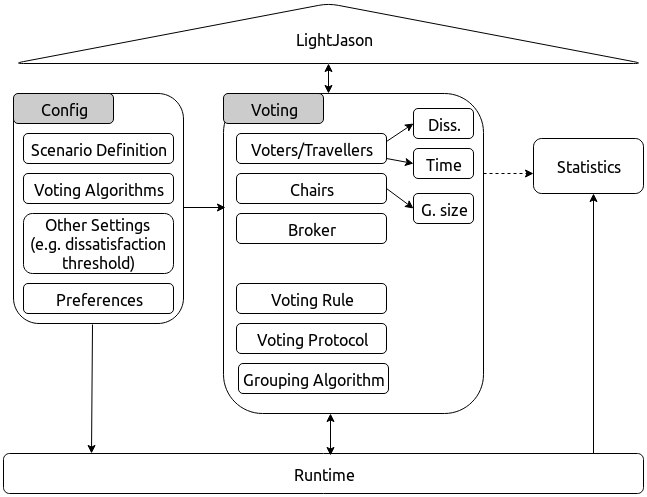
Simulation Architecture
The following figure gives an overview of the LightVoting simulation architecture:
Source Code Statistics

Activities
- 2017-09-04: Attended EWGT 2017, Budapest, 20th EURO Working Group on Transportation Meeting.
- 2017-06-15: Co-authored paper Location- and time-dependent meeting point recommendations for shared interurban rides submitted to JLBS
- 2016-12-15: Attended EUMAS 2016.
- 2016-07-10: Presented paper Iterative committee elections for collective decision-making in a ride-sharing application at ATT 2016
- 2016-06-02: Attended SECURITY 2016.
- 2015-09-28: Presented paper Agent-Based Voting Architecture for Traffic Applications at MATES 2015 and attended Doctoral Consortium of MATES 2015 with talk “Voting in Traffic Applications”.
- 2015-07-06: Attended EASSS 2015.
- 2015-05-06: Presented poster Voter dissatisfaction in committee elections at AAMAS 2015
- 2015-04-26: Co-authored paper Winner Determination and Manipulation in Minisum and Minimax Committee Elections which was accepted for publication at ADT 2015.
- 2015-02-12: Attended AAET 2015.
Publications
- 📖 Aschermann, M.; Dennisen, S.; Kraus, P.; Müller, J. (2018). LightJason, a Highly Scalable and Concurrent Agent Framework: Overview and Application (Demonstration). pp. tbd, ACM Proceedings. Accepted, to appear.
- 📖 Czioska, P.; Trifunović, A.; Dennisen, S.; Sester, M. (2017). Location- and time-dependent meeting point recommendations for shared interurban rides.
- 📖 Dennisen, S.; Müller, J. (2016). Iterative committee elections for collective decision-making in a ride-sharing application. pp. 1-8, CEUR. (New York, USA). Electronic proceedings.
- 📖 Baumeister, D.; Dennisen, S. (2015). Voter dissatisfaction in committee elections. pp. 1707-1708, International Foundation for Autonomous Agents; Multiagent Systems.
- 📖 Baumeister, D.; Dennisen, S.; Rey, L. (2015). Winner determination and manipulation in minisum and minimax committee elections. pp. 469-485, Springer.
- 📖 Dennisen, S.; Müller, J. (2015). Agent-based voting architecture for traffic applications. Lecture notes in artificial intelligence - Proceedings of the 13th german conference of multiagent system technologies (mates 2015), pp. 200-217, volume 9433. Springer-Verlag. (Cottbus, Germany).